Unidad III Estructuras Vehiculares - Sistema de Suspensión
Contenido a Impartir:
1.- Estudios de Sistema de Suspensión: Describir los diferentes tipos de sistemas de suspensión en los vehículos de acuerdo a su aplicación. (Rígida, Ballesta, Independiente, Wishbone, McPhearson, Pull Rod, Push Rod) Adicionalmente esbozar los criterios de diseño y fundamentos matemáticos que rigen su funcionamiento.
1.- Estudios de Sistema de Suspensión: Describir los diferentes tipos de sistemas de suspensión en los vehículos de acuerdo a su aplicación. (Rígida, Ballesta, Independiente, Wishbone, McPhearson, Pull Rod, Push Rod) Adicionalmente esbozar los criterios de diseño y fundamentos matemáticos que rigen su funcionamiento.
Descargar Clase
Esta opción estará disponible temporalmente mientras se actualiza la página web
| unidad_3_suspension.pdf |
1.-Tipos de Sistemas de Suspensión.
El sistema de suspensión es el encargado de soportar tanto el peso del vehículo como los esfuerzos de la transferencias de másas al estar en movimiento junto con las vibraciones producto de las irregularidades del terreno, todo ésto mediante la combinación de distintas configuraciones geométricas de sus componentes mecánicos.
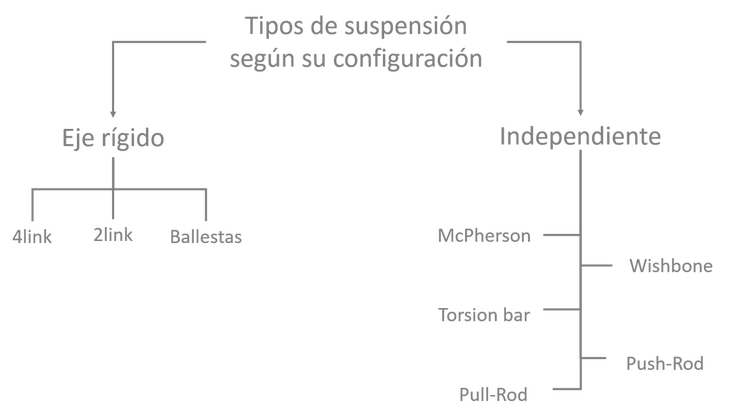
Tipos de Sistemas de suspensión: De todas las posibles configuraciones se pueden agrupar en dos grandes familias, las de eje rígido y las de brazos independientes. Es fácil pensar que la de eje rígido es obsoleta dado que es la más antigua, sin embargo ambas familias son muy utilizadas hoy en día, dado que cada una tiene propósitos diferentes como se observa a continuación:
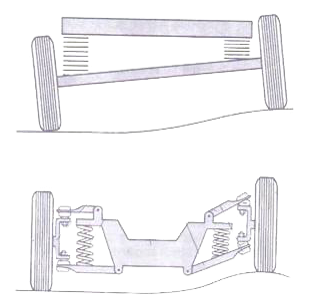
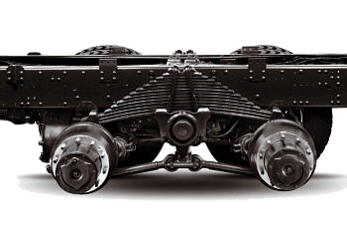
Suspensión de Eje Rígido
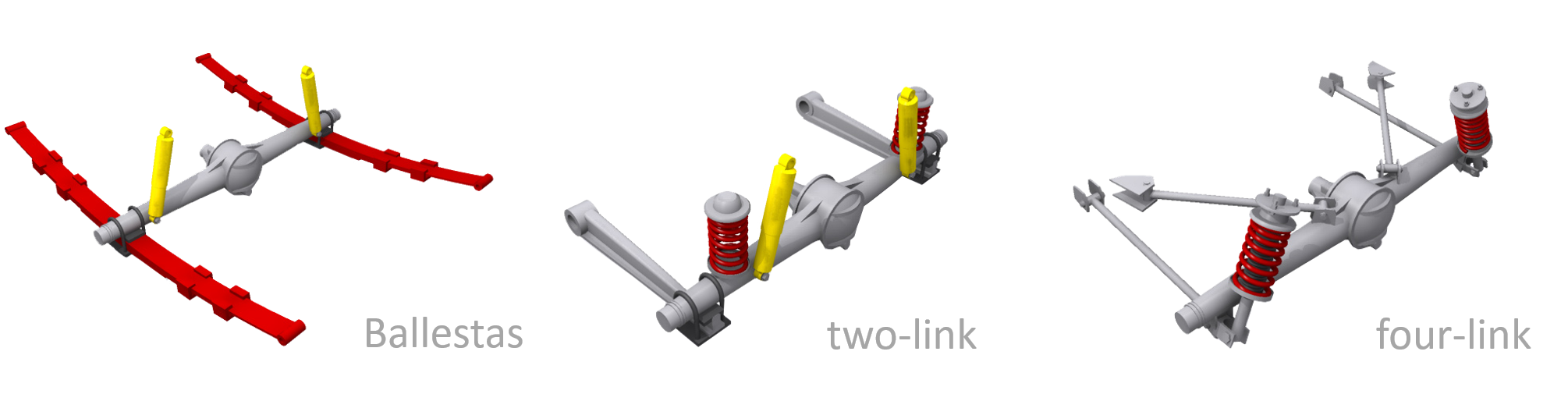
La suspensión de eje rígido se compone de un cuerpo en forma de "tunel" (color gris) en cuyos extremos giran las ruedas y dentro también los ejes de transmisión impulsados por el diferencial y cardán, junto con los muelles de suspensión que soportan el peso (que pueden ser ballestas o resortes helicoidales señalados en color rojo), que pueden tener el atenuador de vibraciones ( color amarillo) posicionado tanto en la parte de afuera del mecanismo que soporta el esfuerzo o también en conjunto integrado como la tercera imagen.
Dado que el eje conecta ambas ruedas, todo el movimiento que afecte a una de ellas se transmite a la otra, esto significa que cuando por ejemplo una rueda se eleva, hay una inclinación del eje y también de las ruedas, haciendo que en algunos casos se pierda una parte del contacto del neumático con el camino lo que se traduce en deslizamientos del vehículo.
La utilidad principal de la suspensión de eje rígido es por ser una de las más económicas dada su facilidad de fabricación, en comparación con la resistencia mecánica que posee, es la más utilizada en camiones de carga (con ballestas) por lo mismo y también en vehículos offroader y camionetas dada su resistencia a los posibles impactos de rocas.
Dentro de ésta familia se encuentran dos cuya única diferencia es la habilidad para "quebrar" la suspensión, l oque se traduce en un mayor grado de libertad para girar el eje completo con suspensiones de recorrido más largo, jugando así con la distancia de los ejes entre los túneles y los centros instantaneos de rotación que se forman. éstas son la 2-link y la 4-link, que son las más utilizadas para vehículos offroaders.
Dicha ventaja de poder contar con un mayor ángulo de rotación del tunel y recorrido vertical es lo que le permite atacar con mayor ventaja los terrenos irregulares y caminos rocosos asegurándose que el neumático esté siempre en contacto contra algo (rocas, asfalto, lodo...)
Dentro de ésta familia se encuentran dos cuya única diferencia es la habilidad para "quebrar" la suspensión, l oque se traduce en un mayor grado de libertad para girar el eje completo con suspensiones de recorrido más largo, jugando así con la distancia de los ejes entre los túneles y los centros instantaneos de rotación que se forman. éstas son la 2-link y la 4-link, que son las más utilizadas para vehículos offroaders.
Dicha ventaja de poder contar con un mayor ángulo de rotación del tunel y recorrido vertical es lo que le permite atacar con mayor ventaja los terrenos irregulares y caminos rocosos asegurándose que el neumático esté siempre en contacto contra algo (rocas, asfalto, lodo...)


|
|
|
En ambos videos mostrados anteriormente es fácil apreciar como el centro instantáneo de rotación del tunel (el punto imaginario del espacio sobre el cual el mecanismo rota) es el centro visual donde se estan el diferencial y el cardán, está diseádo de ésta manera ya que el cardán a pesar de ser un mecanismo de transmisión flexible mientras mayor sea el grado de flexión al que esté sometido menor probabilidad de transferencia de potencia habrá y para el caso de los vehículos de carreras preparados para competencias de rockCrawling (video de la derecha) es importante poder contar con una suspensión que permita la transferencia de potencia exacta hacia las ruedas.
Suspensión independiente:
En éste tipo de suspensión cada rueda va montada con su propio sistema elástico y de articulación al bastidor y los movimientos de una rueda no se transmiten a la otra. Cada conjunto de rueda y resorte absorbe y compensa las oscilaciones de forma independiente, y como disminuye la masa no suspendida, la carrocería no se ve afectada por las vibraciones.
La primera variante de este tipo de suspensión es la McPherson, denominada así por su inventor al ser usada por primera vez en el Ford Consul de 1951, Dicha suspensión se compone de un amortiguador (conjunto shock absorber o atenuador y espiral), y una sola meseta o brazo de control inferior. Para observar estos detalles con mayor facilidad son ilustrados en la figura a continuación.
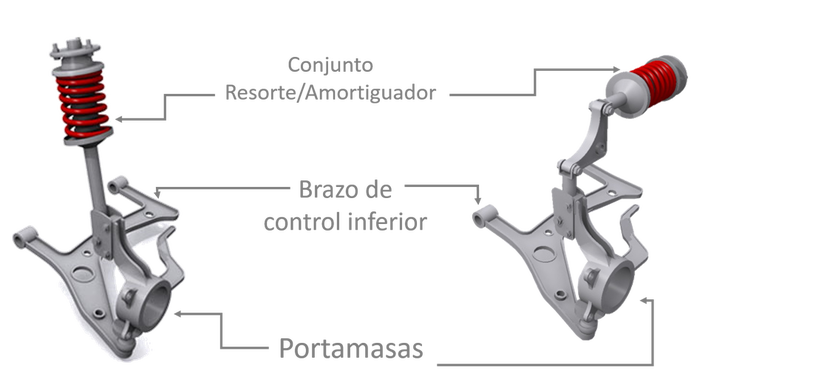
Este tipo de suspensión como se observa requiere un espacio vertical considerable dentro del auto, es una suspensión que se usa comúnmente en la mayoría de los carros de bajo costo debido a que permite posicionar el motor abiertamente facilitando su mantenimiento haciendo de esta configuración un diseño simple y efectivo, sin embargo posee varias desventajas como las que señala el portal web www.carengineer.com en el 2013 en su artículo “Mpherson and Pseudo Mcpherson Suspension” o “Suspension Mcpherson y Pseudo-McPherson” traducido al español como lo son la incapacidad de realizar movimientos verticales sin variar el caster (que más adelante será explicado), además de la incapacidad de jugar con el camber permitiendo que el vehículo pueda sufrir los efectos del sobre-viraje o sub-viraje a la hora de que el automóvil debarealizar una maniobra.
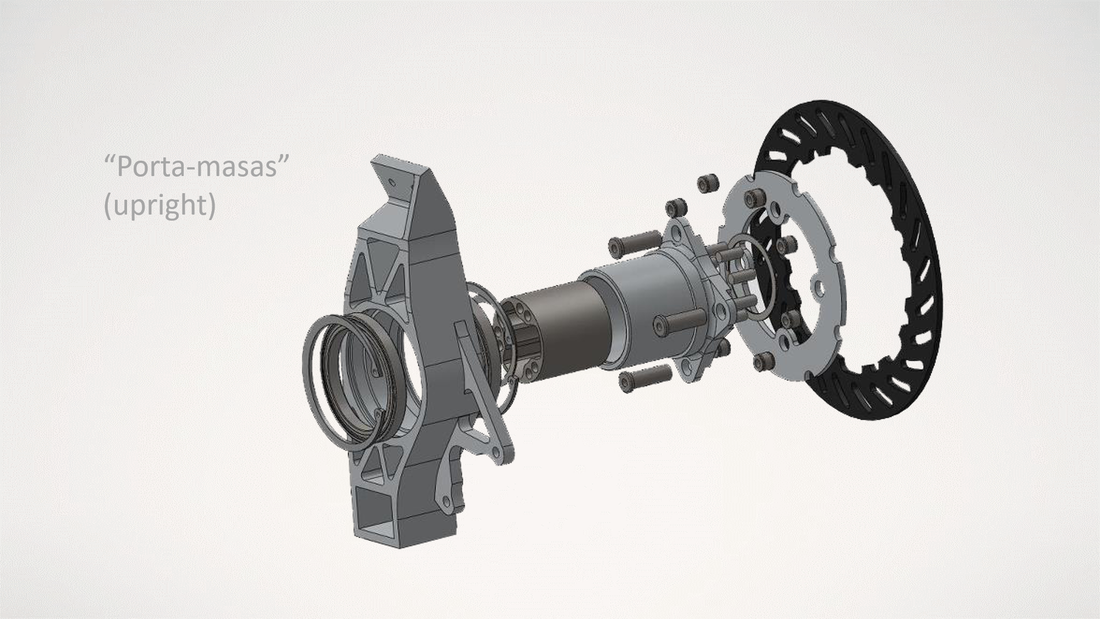
El segundo tipo de suspensión independiente se refiere a la llamada Wishbone o Doble-Wishbone que en configuración es similar a la McPherson, pero cuenta con un brazo de control inferior y un brazo de control superior, lo que permite un movimiento vertical sin variar el camber y caster debido a que el amortiguador se encuentra sujetado desde el brazo de control inferior, como se muestra en la Figura a continuación, al estar posicionado con un cierto grado de inclinación, se absorbe parte de las cargas laterales cuando el vehículo gira en una curva.
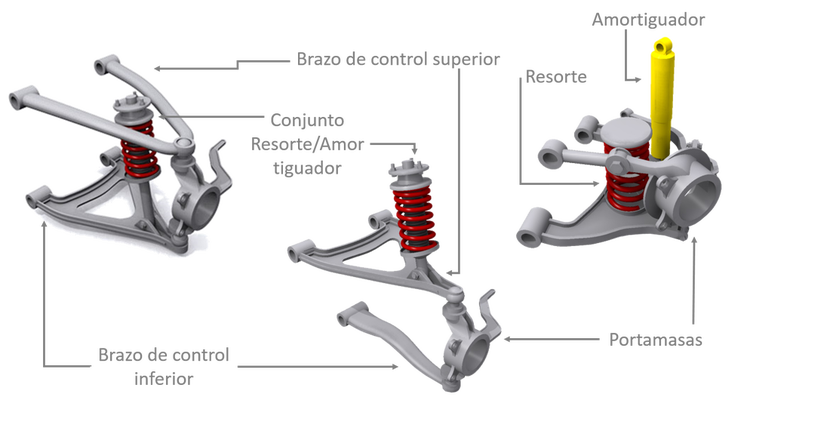
De ésta suspensión se puede observar que ambos brazos pueden pivotear desde sus bases haciendo que el portamasas mantenga siempre un movimiento únicamente vertical (sin variar el camber), lo cual es una ventaja ideal para vehículos de altas prestaciones.
También se puede notar que comprimiendo el amortiguador con el chasis, una pequeña parte del esfuerzo es transferido a los brazos Wishbone.
Generalmente los vehículos que usan este tipo de suspensión también la combinan con una barra de torsión que conecta la base del amortiguador del lado izquierdo con el del lado derecho, para así trasferir la masa de uno a otro y funcionar como uno solo cuando el vehículo realiza alguna maniobra.
Una de sus desventajas es que al poseer una gran cantidad de partes móviles, incluso más que la McPherson, hay mayor probabilidad de que se dañen, además que requiere muchos más ajustes por ser un diseño más elaborado e incluso puede llegar a ser más pesada que una suspensión tipo McPherson.
También se puede notar que comprimiendo el amortiguador con el chasis, una pequeña parte del esfuerzo es transferido a los brazos Wishbone.
Generalmente los vehículos que usan este tipo de suspensión también la combinan con una barra de torsión que conecta la base del amortiguador del lado izquierdo con el del lado derecho, para así trasferir la masa de uno a otro y funcionar como uno solo cuando el vehículo realiza alguna maniobra.
Una de sus desventajas es que al poseer una gran cantidad de partes móviles, incluso más que la McPherson, hay mayor probabilidad de que se dañen, además que requiere muchos más ajustes por ser un diseño más elaborado e incluso puede llegar a ser más pesada que una suspensión tipo McPherson.
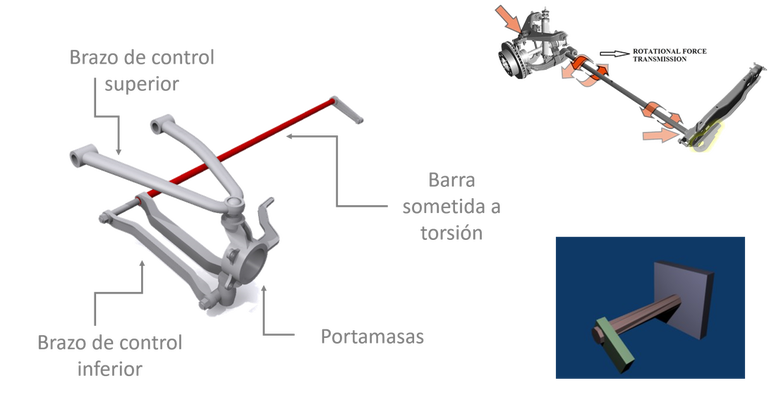
También existe otro tipo de suspensión independiente menos común utilizada por algunos pocos vehículos que necesitaban suspensiones independientes pero relativamente rígidas, en la suspensión por barra de torsión (no confundir con la barra de torsión de más adelante) se sustituye el elemento elástico en forma de resorte por una barra que está sometida a una torsión y al no superar el módulo de elasticidad del material actúa como un elemento elástico ofreciendo resistencia.
Por último existe un tipo de suspensión independiente desarrollado principalmente para vehículos de carreras en el que la ubicación y posición del conjunto resorte/amortiguador juega un papel muy importante en la ubicación estratégica del centro de gravedad general del vehículo, y por eso se sustituye éste por una barra con un balancín cuya función es redirigir el movimiento de los brazos de conrol para comprimir el resorte donde sea que esté posicionado. ésta suspensión es llamada Push-Rod o Pull-Rod (dependiendo del tipo de esfuerzo al que esté sometida dicha barra, bien sea tracción para Pull o compresion para Push). analicemos la siguiente imagen para determinar cuál de las barras está sometida a compresión y cual a tracción suponiendo que se trata de una vista frontal de un vehículo de formula 1 a la que se le hizo un corte transversal en el eje delantero...
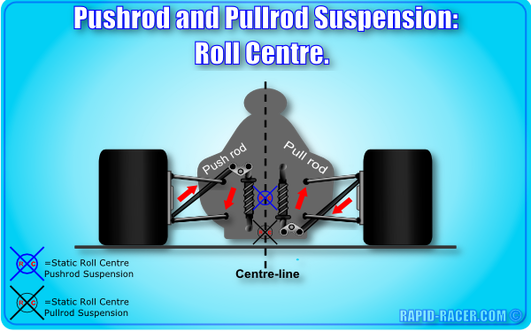
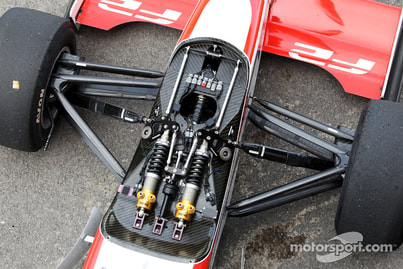
Se puede observar con facilidad que la diferencia principal es la posición del brazo y del amortiguador, en ambos sistemas el peso del monoplaza es trasferido directamente a través del brazo luego guiado a través del balancín para comprimir el amortiguador que se ubica en la forma más conveniente, también es importante señalar que la imagen anterior muestra sólo un esquema en el que los amortiguadores se posicionan de manera vertical, pero para el caso de un vehículo monoplaza, en la parte frontal por ser más estrecho se pueden posicionar de manera horizontal ahorrando más espacio como se muestra en la Figura anexa de una suspensión Push-Rod de un vehículo de formula 2.
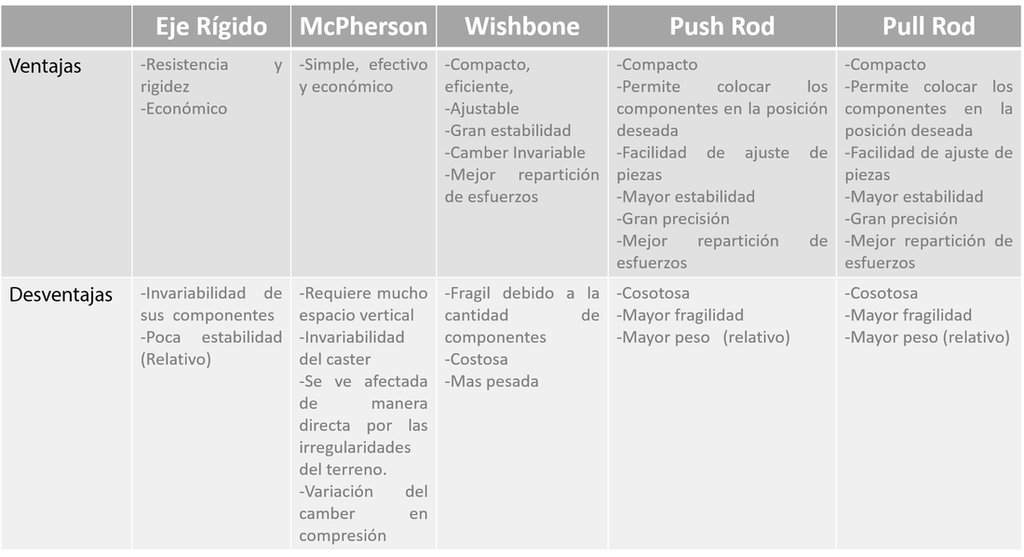
A continuación una tabla de comparación de todos los tipos de suspensión y sus principales ventajas y desventajas.
2.-Términos básicos para el diseño de un sistema de suspensión:
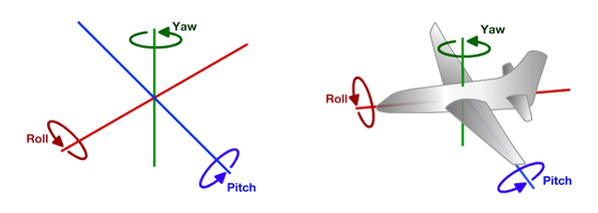
Roll, Pich, Yaw: Son tipos de movimientos en cuerpos dinámicos utilizadas para definir rotación en el eje longitudinal rojo (Roll), en el eje transversal azul (pitch) o cabecéo, o en el eje vertical verde (yaw) definidos entre -90 y 90 grados
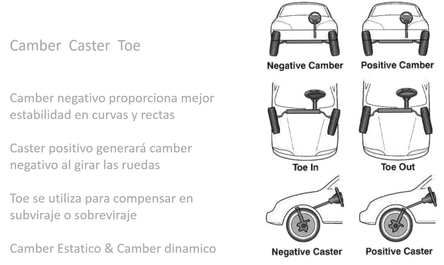
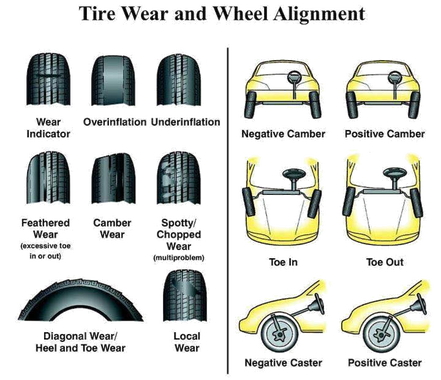
Camber: Es la inclinación del plano de las ruedas con respecto de la vertical, es positivo si la rueda se ladea hacia afuera y normalmente varía entre 1 y 0.05 grados. El camber es usado para dar estabilidad en las curvas, ya que con cierta inclinación, en una curva, debido a la transferencia de masas y el efecto Roll, el neumático del vehículo queda recto dando una mayor área de fricción y por lo tanto más agarre, pero este mismo efecto ocasiona que el neumático sufra de desgaste disparejo cuando el vehículo se mueve en línea recta ya que el área de contacto es solo la parte interna del caucho y por lo tanto esta parte se desgastará más rápido.
El ángulo de camber o caída puede ser estático y dinámico, esto quiere decir que existe un camber cuando el vehículo simplemente avanza frontalmente sin sufrir efectos de las cargas laterales, esto permite entender que para mantener un máximo agarre en los neumáticos el ángulo debería ser casi nulo, pero cuando el vehículo entra en una curva y comienza a sufrir los efectos de la carga lateral, propiamente del Efecto Roll, la suspensión actúa y modifica el camber en función de la disposición del roll center, es decir, gana o pierde camber mientras más se incline el vehículo
El ángulo de camber o caída puede ser estático y dinámico, esto quiere decir que existe un camber cuando el vehículo simplemente avanza frontalmente sin sufrir efectos de las cargas laterales, esto permite entender que para mantener un máximo agarre en los neumáticos el ángulo debería ser casi nulo, pero cuando el vehículo entra en una curva y comienza a sufrir los efectos de la carga lateral, propiamente del Efecto Roll, la suspensión actúa y modifica el camber en función de la disposición del roll center, es decir, gana o pierde camber mientras más se incline el vehículo
Caster: es la inclinación del eje geométrico hacia la dirección delantera o trasera, (imaginando el vehículo lateralmente), es el ángulo entre el eje geométrico de la dirección y la vertical. Se considera positivo si el extremo superior geométrico de la dirección está inclinado hacia atrás. Cuanto máyor sea el ángulo de caster, mayor será el esfuerzo que se necesita para girar la dirección.
El ángulo caster tiene un efecto positivo en el camber al momento de girar, con caster positivo la rueda de afuera gana camber negativo y la rueda interior camber positivo, causando que ambas ruedas se recuesten dentro de la curva. El ángulo de caster es seleccionado de manera arbitraria realizando un estudio cinemático o simulación de movimiento, de tal forma que al girar a ciertos grados las ruedas, el camber que ganarán dichas ruedas sea el camber necesario para que sea igual al camber dinámico, cabe destacar que esto sólo se aplica en las ruedas delanteras ya que son las que giran, por eso se debe tomar en cuenta los radios de las curvas.
El ángulo caster tiene un efecto positivo en el camber al momento de girar, con caster positivo la rueda de afuera gana camber negativo y la rueda interior camber positivo, causando que ambas ruedas se recuesten dentro de la curva. El ángulo de caster es seleccionado de manera arbitraria realizando un estudio cinemático o simulación de movimiento, de tal forma que al girar a ciertos grados las ruedas, el camber que ganarán dichas ruedas sea el camber necesario para que sea igual al camber dinámico, cabe destacar que esto sólo se aplica en las ruedas delanteras ya que son las que giran, por eso se debe tomar en cuenta los radios de las curvas.
Toe: Desde una vista superior del auto, es el ángulo que forman las ruedas en relación al eje de Roll del automóvil, es utilizado para corregir efectos de sobreviraje y subviraje del vehículo. Si la alineación es hacia adentro ayudará a lograr un mejor agarre en las curvas, si por el contrario las ruedas están inclinadas hacia afuera empeorará el comportamiento del auto en curvas, pero mejorará la estabilidad del eje trasero al momento de arrancar ya que se creará un efecto "auto alineante" en las ruedas.
La modificación de éstos tres ángulos sin la precisión correcta ocasionará desgaste innecesario y acelerado en los neumáticos, por lo que es muy importante que se hagan los cálculos correctos para seleccionar el ángulo ideal para cada tipo de circuito (en caso de autos de carreras) ya que para vehículos de calle la alineación colocada en los talleres es de cero grados para evitar el desgaste no deseado en componentes.
La modificación de éstos tres ángulos sin la precisión correcta ocasionará desgaste innecesario y acelerado en los neumáticos, por lo que es muy importante que se hagan los cálculos correctos para seleccionar el ángulo ideal para cada tipo de circuito (en caso de autos de carreras) ya que para vehículos de calle la alineación colocada en los talleres es de cero grados para evitar el desgaste no deseado en componentes.
|

Efecto del Caster positivo al girar la dirección (variación del Camber)
|
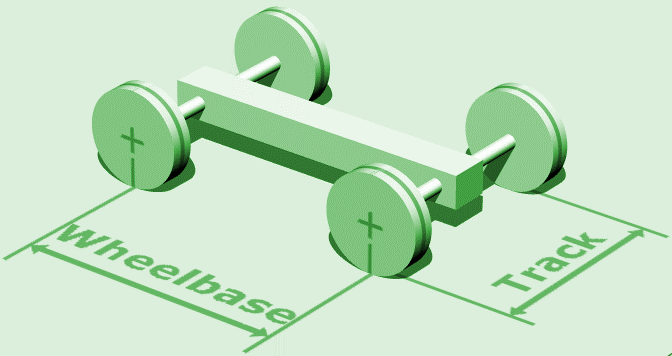
Wheelbase (Distancia entre ejes): es la distancia que existe entre el centro de la rueda delantera y el centro de la rueda trasera.
Track (distancia entre ruedas) : es la distancia que existe entre el centro de la rueda izquierda y el centro de la rueda derecha en un mismo eje.
mientras mayor sea la proporción del track en comparación con el wheelbase mejor comportamiento podrá tener el vehículo en las curvas, caso contrario cuando el wheelbase es mucho mayor en proporción al track mejor comportamiento y estabilidad tendrá el vehículo en líneas rectas (carreras de drag por ejemplo). por lo general los vehículos de circuitos de carreras buscan tener el track delantero hasta un 5% mayor que el track trasero lo que también mejora el comportamiento del vehículo en las curvas. Aumentar la distancia de track delantero tendrá como resultado una reducción en la transferencia lateral de masas y para minimizar el efecto de torsión en el eje trasero.
|
|
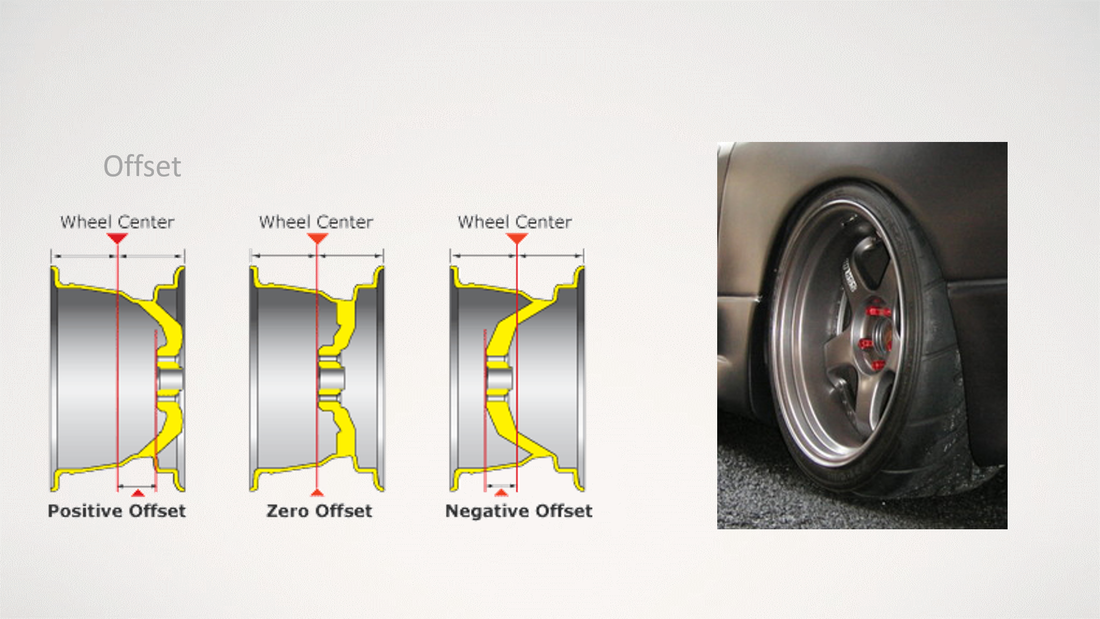
El Offset se refiere a la distancia que existe entre el centro del plato de los rines hasta el borde externo de los mismos, en autos de carrera suele usarse un ofseet negativo (en el que los brazos estrella del rin tienen profundidad hacia adentro) combinado con resortes de mayor dureza lo que se traduce en un menor recorrido vertical del neumático para comprimir el resorte la misma cantidad de pulgadas. en autos de calle convencionales los rines tienden a tener offset positivo para aprovechar el espacio y ubicar de mejor manera los brazos de control y demás componentes de la suspensión.
Masas Suspendidas: Se considera masa suspendida a todas las masas cuyo peso es soportado por el sistema de suspensión, incluyendo el piloto, el motor, la batería, bomba de aceite, dirección, extintores y demás. Las masas no suspendidas son las que no influyen en la suspensión, como los rines, los cauchos y los discos de freno.
Masas No Suspendidas: Todos aquellas masas cuyos pesos no afectan el sistema de suspensión, como por ejemplo los neumáticos, rines, disco de frenos, brazos de control, rodamientos, etc.
Masas No Suspendidas: Todos aquellas masas cuyos pesos no afectan el sistema de suspensión, como por ejemplo los neumáticos, rines, disco de frenos, brazos de control, rodamientos, etc.
Roll Center: tal como en la asignatura dinámica de máquinas se trazan líneas imaginarias que describen el movimiento de cuerpos y aceleraciones y centros de rotación en el espacio, el roll center es un punto imaginario en el espacio sobre el cual toda la masa suspendida del vehículo va a rotar cuando el vehículo se incline al tomar una curva. a continuación se observa un ejemplo en el que se aprecia que dependiendo de la geometría del vehículo se obtendrán distintas ubicaciones para el rollcenter del vehículo (NOTA: ROLL CENTER NO ES EL CENTRO DE GRAVEDAD, SON DOS CONCEPTOS DISTINTOS)
Imaginemos por un segundo que tenemos un Ford mustang como éste en una vista frontal, luego de que le hagamos un corte transversal en el eje delantero descubriríamos una suspension tipo wishbone con brazos de control superior e inferior, un portamasas y por el momento obviaremos el conjunto resorte/amortiguador.
Para hallar el roll center de ésta suspensión se proyectan dos líneas que comienzan justo donde se unen los brazos de control al chasis del vehículo hasta que se intersecten en la distancia siguiendo los ángulos de dichos brazos de control, seguidamente se traza una línea desde el centro del neumático hasta el punto donde se intersectaron las líneas previamente trazadas. por último se puede repetir el procedimiento con la rueda del otro lado o se puede trazar una línea vertical que corte al vehículo en una mitad izquierda y derecha y el punto donde dicha línea se encuentra con la línea (amarilla en la imagen del mustang) trazada desde los neumáticos será el roll center.
Es importante tener en cuenta que el roll center no es un punto fijo y que puede variar a medida que el auto se inclina, para ésto más allá del dibujo mecánico es conveniente utilizar sofwares de análisis geométrico/dinámico (como el de los videos a continuación) donde se pueda observar con mayor exactitud el desplazamiento del roll center por el espacio.
También es importante notar que la ubicación del roll center dependerá de variables como el offset de los rines elegidos (lo que posicionará el neumático más afuera) el ancho y alto de los neumáticos, la altura del chasis del vehículo, la altura y ubicación de los anclajes de los brazos de control.
Para hallar el roll center de ésta suspensión se proyectan dos líneas que comienzan justo donde se unen los brazos de control al chasis del vehículo hasta que se intersecten en la distancia siguiendo los ángulos de dichos brazos de control, seguidamente se traza una línea desde el centro del neumático hasta el punto donde se intersectaron las líneas previamente trazadas. por último se puede repetir el procedimiento con la rueda del otro lado o se puede trazar una línea vertical que corte al vehículo en una mitad izquierda y derecha y el punto donde dicha línea se encuentra con la línea (amarilla en la imagen del mustang) trazada desde los neumáticos será el roll center.
Es importante tener en cuenta que el roll center no es un punto fijo y que puede variar a medida que el auto se inclina, para ésto más allá del dibujo mecánico es conveniente utilizar sofwares de análisis geométrico/dinámico (como el de los videos a continuación) donde se pueda observar con mayor exactitud el desplazamiento del roll center por el espacio.
También es importante notar que la ubicación del roll center dependerá de variables como el offset de los rines elegidos (lo que posicionará el neumático más afuera) el ancho y alto de los neumáticos, la altura del chasis del vehículo, la altura y ubicación de los anclajes de los brazos de control.
Simulador de Suspensiones www.vsusp.com
|
|
|
El objetivo acá es experimentar con éste software (www.vsusp.com) y hacer múltiples intentos hasta que la geometría correcta permita que la suspensión se comprima sin que las ruedas ganen mucho camber, entre 0 y 0,7 grados de inclinación es un valor aceptable, para ello los brazos de control no podrán tener medidas iguales ni ser paralelos entre sí. Aumentar la distancia Track también hará que la ganancia de camber sea menor.
Dicho software realiza aproximaciones geométricas de suspensiones wishbone y mcpherson.
Dicho software realiza aproximaciones geométricas de suspensiones wishbone y mcpherson.
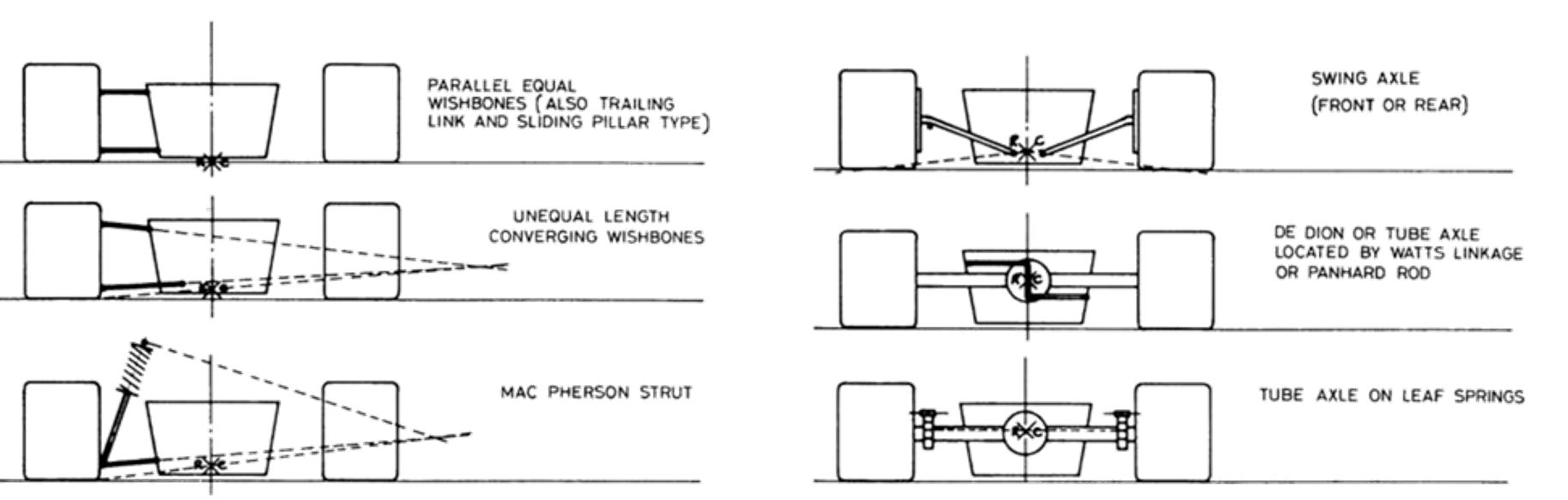
A continuación una tabla para ubicar fácilmente centros de rotación de otros tipos de suspensiones:
Al posicionar un roll center por encima del nivel del piso se crearán unas fuerzas que intentarán ejercer flexión sobre los brazos de control, estas fuerzas son llamadas "jacking" y pueden afectar seriamente la integridad de los brazos ya que no deberían soportar éste tipo de esfuerzos, su función es únicamente sujetar las ruedas, y demás masas no suspendidas. pero también se aumentará la velocidad de respuesta de la suspensión.
Por el contrario si el roll center queda posicionado muy por debajo del nievel del piso la suspensión tendrá una velocidad de respuesta muy lenta al girar los neumáticos de la dirección.
Por el contrario si el roll center queda posicionado muy por debajo del nievel del piso la suspensión tendrá una velocidad de respuesta muy lenta al girar los neumáticos de la dirección.
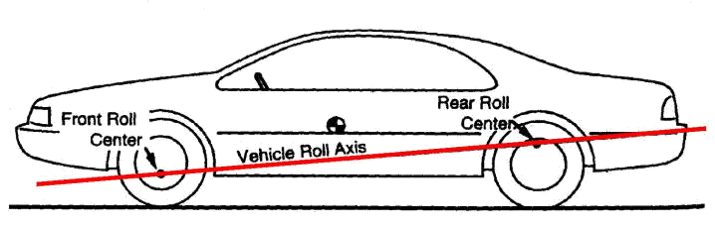
Al tener la altura del Rollcenter de los ejes delantero y trasero se puede trazar una linea imaginaria para definir el eje de rotación Roll del automóvil lo que facilitará una visión de cómo se comportarán las masas suspendidas cuando el auto intente inclinarse.
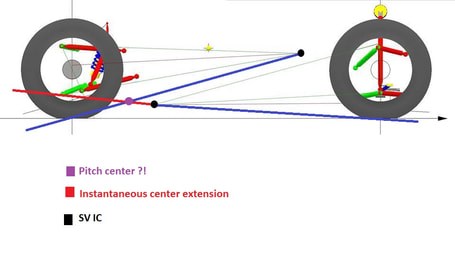
Pitch Center: Tal como el roll center proviene de la rotación en el eje roll, se puede conseguir un eje de rotación pitch de la siguiente manera:
|
En una vista lateral del vehículo, se proyectan lineas que continuen los ángulos que forman entre sí los brazos de control superior e inferior tanto del eje delantero como del eje trasero hasta que se intersecten, luego se traza desde el el punto céntrico de contacto con el pisode cada rueda una recta hasta cada uno de los puntos intersectados previamente, el punto (señalado en púrpura) en la imagen anexa es el pitch center, el centro instantáneo de rotación del movimiento pitch que se forma en el punto donde se intersectan ambas líneas trazadas desde los neumáticos en el paso anterior.
|
|
Dive: Cuando el vehículo está en movimiento e intenta frenar bruscamente la inercia provica que haya una transferencia de masas hacia el eje delantero ocasionando que casi toda la masa se apoye sobre éste, de la misma manera como un clavadista se lanza de frente hacia la piscina (dive en español significa lanzarse de frente en clavado)

|
Squat: Cuando el vehículo detenido acelera, la transferencia de masas producto de la inercia hace que casi toda se apoye sobre el eje trasero, inclinando el automóvil hacia atras casi como el ejercició de crossfit que lleva el mismo nombre.

|

En la imagen anterior se muestran los efectos de la transferencia de masas producto del dive y squat al acelerar y frenar
|
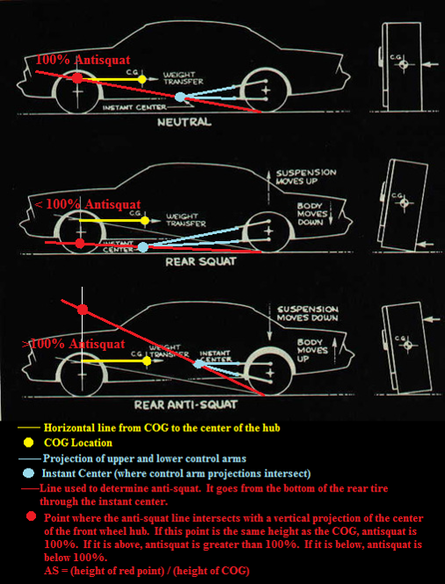
Anti-Squat & Anti-Dive: Para reducir el efecto squat o dive en la suspensión se le otorga una cierta inclinación a los brazos de control de la suspensión de forma que (en una vista lateral) la proyección de la línea que sale del centro del neumático hasta el pitch center coincida con el eje de las ruedas opuestas. Si la altura de dicho punto posee la misma que el centro de gravedad se puede decir que el efecto squat será reducido en su totalidad (100%), en cambio si se encuentra por debajo de la altura del centro de gravedad el anti-squat o anti-dive serán menores al 100%.
Sabiendo que el squat y dive en la dinámica de una suspensión se deben a la transferencia de masas producto de una aceleración o frenada del vehiculo, es importante resaltar que una anti-squat o anti-dive del 100% reducirán por completo el efecto de ¨cabeceo¨ en el vehículo asi como la absorción de las fuerzas en los amortiguadores, ésto quiere decir que dichas fuerzas serán absorbidas por los brazos de control y por lo tanto sus anclajes en forma de fuerzas jacking, lo que se traducirá en bujes de suspensión que se gastarán más rápido. En autos de carreras por lo general se utiliza un valor cercano al 100% para el anti-squat, mientras que para vehículos de produccion en serie para abaratar los costos y aumentar la durabilidad se utilizan valores menores al 50% de anti-squat. |
|
Centro de Gravedad: Es el punto del espacio sobre el cual las masas de un objeto o la sumatoria de las masas de varios ejercen su peso. para el caso de un objeto con una forma definida y densidad constante el centroide del mismo estará ubicado en el centro geométrico de dicha figura, para el caso de las masas suspendidas de un automóvil es un poco más elaborado, sin embargo se pueden lograr aproximaciones a figuras regulares o confiar en los resultados de softwares como inventor y solidworks que poseen un algoritmo interno para determinar los centros de gravedades de figuras irregulares.
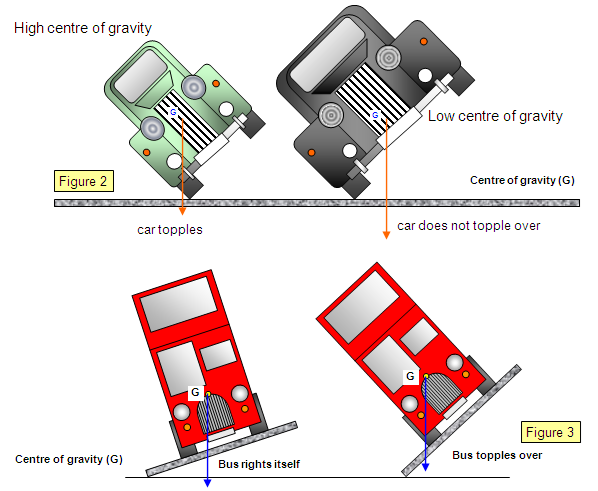
Es conveniente que dicho centro de gravedad esté ubicado lo más bajo posible, lo que garantizará una estabilidad mucho mayor impidiendo que el vehículo llegue a sufrir volcamiento.
Si al inclinar un vehículo el vector resultante de su centro de gravedad sobrepasa el ancho de la distancia track éste se volcará al instante. Por eso también se busca hacer dicha distancia más larga combinando con rines de offset negativo. |
|
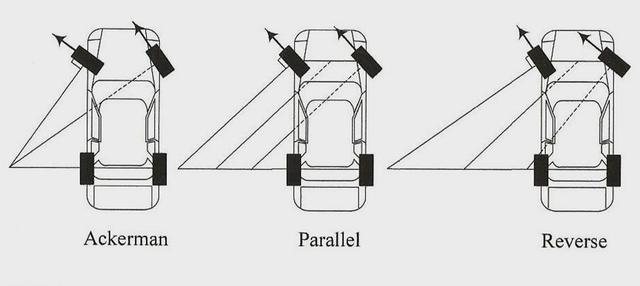
Ángulo de Ackermann: es el ángulo similar al TOE positivo que se forma entre ambas ruedas delanteras para que al girar la dirección se compense la diferencia de radios para poder seguir una circunferencia constante a velocidad constante como se muestra en el video a continuación:
|
|
Todos los vehículos poseen ángulo de ackermann, y es fácil presumir que en auos de carreras el ángulo de ackermann debería notarse más, sin embargo, considerando que son vehículos que circulan a altas velocidades, en curvas muy cerradas la transferencia de masas es más agresiva y en caso de una curva casi todo el apoyo queda sobre la rueda que está del lado externo a la curva por lo que se usa un ackermann reverso para poder garantizar que el vehículo pueda seguir la curva sin deslizar los neumáticos, llevándolos hasta el límite.
3.-Análisis dinámico del sistema de suspensión
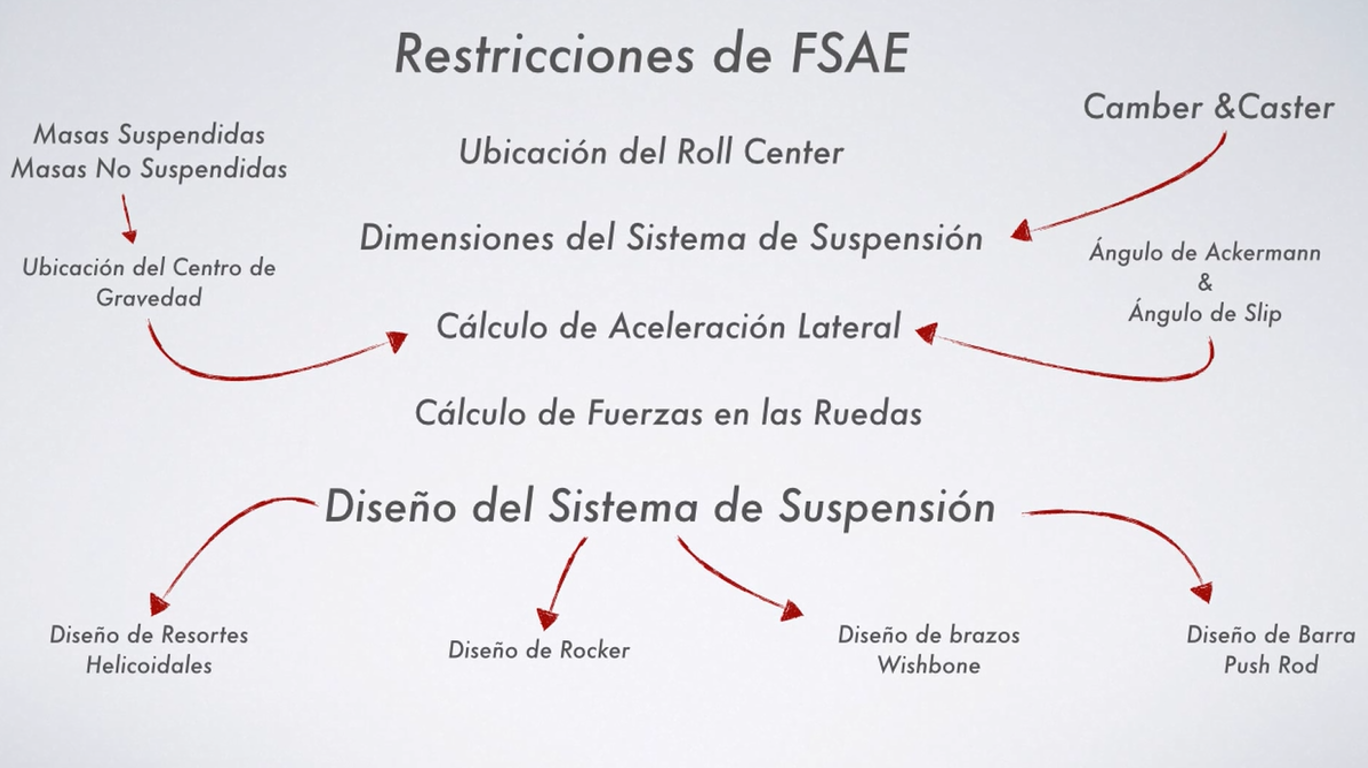
Suponiendo que quisieramos diseñar la suspensión de un vehículo de competencias tipo fórmula student o fsae, lo primero a realizar es leer la norma que regula la competencia y obtener las restricciones que afecten directamente al diseño de suspensión. lo mismo podría extrapolarse a cierta manera si quisieramos diseár un vehículo de calle revisando los estándares de diseño de los mercados europeo, americano y asiático ya que no se podrá invertir tiempo y esfuerzo en fabricar un vehículo que no podrá circular en algunas calles por no cumplir los requerimientos técnicos.
Luego de elegir el tipo de neumático que usará el vehículo el siguiente paso sería ubicar el rollcenter definiendo en conjunto los ángulos de camber y caster y las dimensiones que poseerá el sistema de suspensión. En paralelo se intenta obtener una aproximación también del centro de gravedad de las masas suspendidas para luego entrar a calcular aceleraciones y fuerzas de la siguiente manera basado en las ecuaciones de Innocenti (2013):
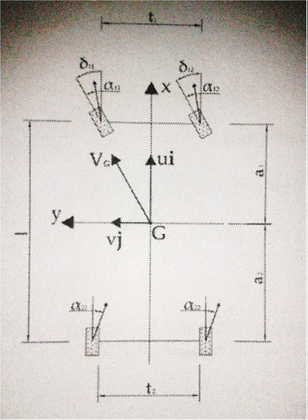
Suponiendo que se tiene una curva de radio "R" sobre la cual girará el vehículo se calculan las velocidades u y v mediante igualación o sustitución en las siguientes ecuaciones:

La ecuación 1 se refiere a las ruedas delanteras y la ecuación 2 a las ruedas traseras, en las que:
𝛿 es el ángulo de giro de los neumáticos en una curva determinada 𝛼1 y 𝛼2 se refieren al ángulo de slip de los neumáticos delanteros y traseros 𝑎1 y 𝑎2 es la distancia desde el centro de gravedad hasta el eje de las ruedas 𝑟 es la velocidad angular del vehículo o a la que se desea ir en la curva 𝑣 representa la velocidad lateral del vehículo 𝑢 es la velocidad lineal longitudinal del vehículo |
|
Luego, obteniendo las velocidades u y v, se calculan las aceleraciones longitudinales y laterales a través de la ecuación 3 y 4 respectivamente extraídas del estudio de Inocenti (2013) también
En la que 𝑢̇ representa una velocidad en un estado invariable y R es una constante que representa el radio de la curva sobre la que está girando el vehículo. (para el caso de un FormulaSAE podría ser el radio del skidpad, una de las pruebas a las que se somete el vehículo).
|
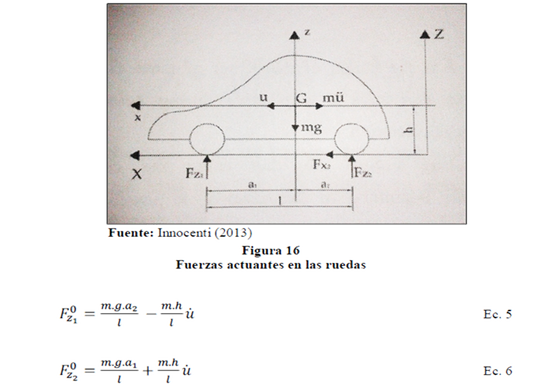
Para el cálculo de las cargas que actuan en cada eje se utilizan las ecuaciones 5 y 6:
En donde el valor l representa la distancia entre ejes o wheelbase, g es el valor de la gravedad, h es la altura desde el piso hasta el centro de gravedad y 𝐹0𝑧1 y 𝐹0𝑧2 son las fuerzas del peso del carro actuando en las ruedas delanteras y traseras respectivamente, mientras que m representa la masa suspendida del monoplaza la cual debe ser estimada con la mayor exactitud posible. Luego de calcular las fuerzas estáticas en los neumáticos se calculan las fuerzas dinámicas en los neumáticos las cuales son producto de la transferencia de masas debido a las aceleraciones laterales, produciendo una fuerza centrífuga y una centrípeta, Innocenti (2013), dentro de la misma serie de ecuaciones postula una para cada rueda del vehículo, donde los subíndices 11 y 12 se refieren a las ruedas delanteras izquierda y derecha respectivamente, de la misma manera que los subíndices 21 y 22 se refieren a las ruedas traseras izquierda y derecha respectivamente. Las fuerzas 𝐹𝑧11 , 𝐹𝑧12 , 𝐹𝑧21 y 𝐹𝑧22 representan las fuerzas que actúan de manera dinámica en los neumáticos al estar sometido a cargas laterales, estas fuerzas son transferidas a través de un porta masas bien sea hacia las barras Push o Pull Rod (en caso de que se haya elegido una suspension de este tipo) y de allí hacia los rockers y amortiguadores, o hacia los amortiguadores directamente en caso de que se haya elegido una suspensión de tipo wishbone o Mcpherson. dichas fuerzas son las que deben ser utilizadas para calcular los distintos elementos mecánicos que componen el sistema de suspensión, (brazos de control, portamasas, resistencia y constante k del resorte). |
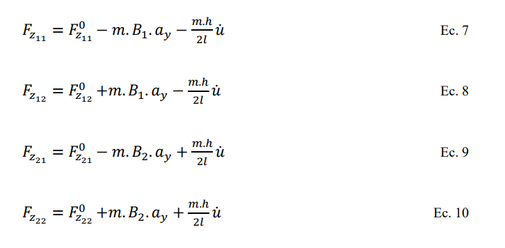
Los factores 𝐵1 y 𝐵2 se calculan de la siguiente manera:

en los que T1 y T2 se refieren a la distancia track del eje delantero y del eje trasero respectivamente
|
En la siguiente imágen se puede observar un ejemplo realizado para el Grupo de Investigación Formula SAE-UFT en el que se calcularon las fuerzas resultantes en cada una de las ruedas para su primer prototipo de vehículo:
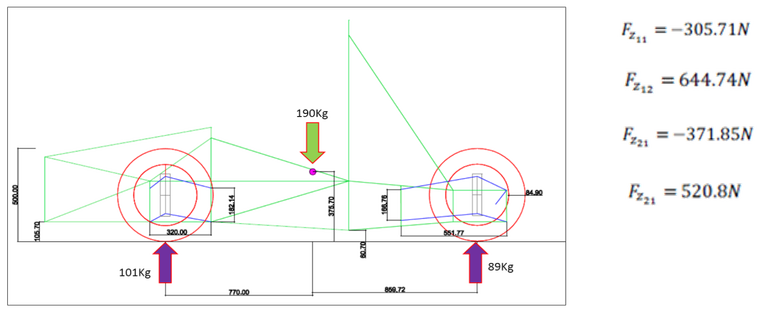
De acuerdo a los subindices explicados anteriormente se observa que la fuerza Fz12 (la fuerza en la rueda externa del eje delantero) es la que que estará sometida a un mayor esfuerzo, ésto debido a que el centro de gravedad en éste caso estaba ubicado ligeramente más adelante.
Por lo general se deben distribuir las masas suspendidas a lo largo del vehículo de forma que la distribución de pesos sea 50%-50% entre ambos ejes, o ligeramente mayor en el eje donde están las ruedas de tracción. Para el caso de éste FSAE (que cuenta con tracción trasera) fué necesario reubicar algunas masas y aligerar peso en la parte frontal de forma que la distribución de masas fuera 45%-55% a favor del eje trasero.
Realizar el diseño y análisis dinámico de un sistema de suspensión puede que parezca un poco tedioso pero es un proceso que se debe realziar cíclicamente al menos unas 3 veces para garantizar la precisión de los cálculos hasta conseguir los parámetros ideales.
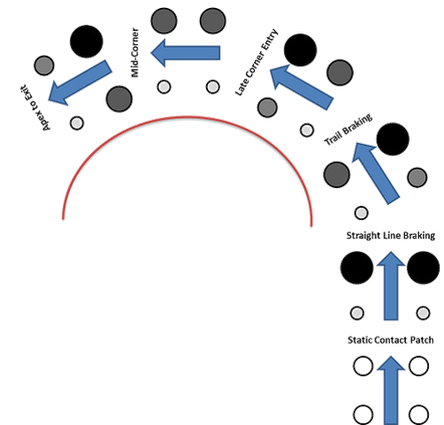
A continuación dos ejemplos de cómo actua la transferencia de masas sobre cada rueda al momento de tomar una curva, en el video se observa también como varía el recorrido de los amortiguadores así como también la presión de los neumáticos.
Por lo general se deben distribuir las masas suspendidas a lo largo del vehículo de forma que la distribución de pesos sea 50%-50% entre ambos ejes, o ligeramente mayor en el eje donde están las ruedas de tracción. Para el caso de éste FSAE (que cuenta con tracción trasera) fué necesario reubicar algunas masas y aligerar peso en la parte frontal de forma que la distribución de masas fuera 45%-55% a favor del eje trasero.
Realizar el diseño y análisis dinámico de un sistema de suspensión puede que parezca un poco tedioso pero es un proceso que se debe realziar cíclicamente al menos unas 3 veces para garantizar la precisión de los cálculos hasta conseguir los parámetros ideales.
A continuación dos ejemplos de cómo actua la transferencia de masas sobre cada rueda al momento de tomar una curva, en el video se observa también como varía el recorrido de los amortiguadores así como también la presión de los neumáticos.
|
Comportamiento Dinámico de un Sistema de Susensión
(NOTA: Si, éste video corresponde a un videojuego llamado Forza que puede ser usado en algunos casos como simulador, sin embargo la telemetría en éstos casos se usa con fines ilustrativos) |
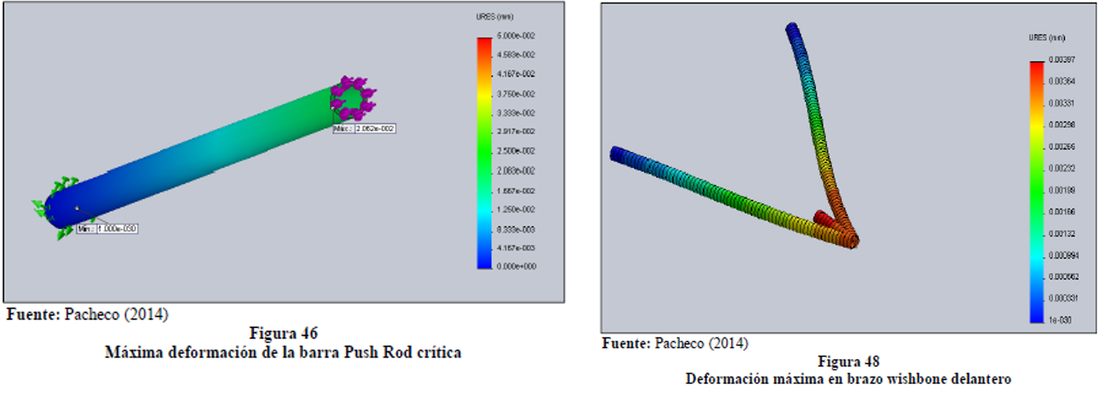
De éste punto en adelante ya se cuenta con la fuerza que atraviesa a cada uno de los componentes del sistema de suspensión se pueden utilizar los métodos tradicionales de diseó de elementos de máquinas y mecánica estática o se pueden utilizar también herramientas de diseño especializadas como solidworks e inventor que permiten simulaciones mecánicas para distintos materiales en la misma estructura, lo cual le permite al ingeniero elegir el diseño y material que más se adapte a sus necesidades.
Barra estabilizadora: tambien es llamada Anti-Roll bar, Strut bar, o barra de torsion, es una barra que se utiliza para conectar de forma directa el lado izquierdo de la suspensión con el lado derecho, haciendo que una suspensión independiente actue con la resistencia y dureza de una de eje rígido, transfiriendo cargas de un lado a otro, l oque ayuda a reducir la inclinación Roll del vehículo mejorando la estabilidad.
En algunos casos el emcanismo para coenctarlos es una barra que está sometida a torsión (de allí su nombre) pero en otros casos es una barra o estructura que coencta las bases de un amortiguador con el otro lo que también ayuda a aumentar la rigidez torsional del chasis.
a continuación varios ejemplos de barras estabilizadoras:
En algunos casos el emcanismo para coenctarlos es una barra que está sometida a torsión (de allí su nombre) pero en otros casos es una barra o estructura que coencta las bases de un amortiguador con el otro lo que también ayuda a aumentar la rigidez torsional del chasis.
a continuación varios ejemplos de barras estabilizadoras:
|
|

En algunos casos como por ejemplo los vehículos offroaders es necesario desconectar de alguna manera la barra estabilizadora, dado que se necesita "liberar la suspensión" para que se adapte mejor a las irregularidades del terreno y por eso algunas barras de torsión en suspensiones de eje rígido traen un pasador de gancho que al liberarlo permite el "quiebre" de la suspensión para los casos en los que el terreno lo amerite.

|
|
