Sistema de Dirección
4.- Estudios de Sistema de Dirección: Describir los tipos de Sistemas de dirección desarrollados para los vehículos según su aplicación o requerimientos técnicos (Columna rígida, Guaya, Entre Otros) Adicionalmente esbozar los criterios de diseño y fundamentos matemáticos que rigen su funcionamiento.
Descargar Clase
| unidad_3_dirección.pdf |
Pruebas en Formula SAE para el sistema de dirección y ángulo de Ackermann
|
|
|
1.-Tipos de Sistemas de Dirección
El sistema de dirección es el encargado de controlar el rumbo del vehículo mediante un conjunto de elementos mecánicos que permiten orientar las ruedas directrices en cunfión de las maniabras realizadas sobre un mando de accionamiento.
adicionalmente también tiene la tarea de reducir las vibraciones en dicho control de mando de las imperfecciones e irregularidades del terreno en el mando de accionamiento permitiendo un manejo mas suave del vehículo.
adicionalmente también tiene la tarea de reducir las vibraciones en dicho control de mando de las imperfecciones e irregularidades del terreno en el mando de accionamiento permitiendo un manejo mas suave del vehículo.
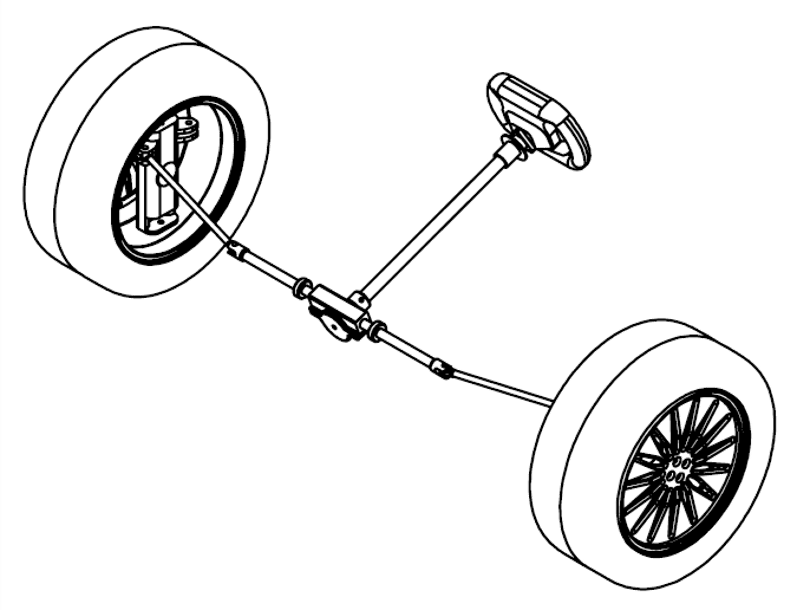
Dirección mecánica: Es el más básico de todos, compuesto por un piñón y una cremallera, el piñón de dientes helicoidales gira accionado por un cardán y volante y hace desplazar hacia los lados la cremallera que tiene atornillada a sus extremos los brazos de dirección que se conectan al portamasas.
|
Es el más económico de todos los sistemas de dirección, puesto que solo requiere elementos mecánicos fáciles de fabricar, y una de sus grandes ventajas es la capacidad de transmitir de manera directa las características del pavimento hasta el volante creando una comunicación entre las curvas de un circuito de carreras y las manos de un piloto experimentado que controla a su totalidad la dirección del automóvil.
Por otro lado esa misma ventaja puede que sea considerada una desventaja para vehículos de calle comunes ya que transmitirá todas las vibraciones e irregularidades del terreno hasta el volante, llegando a causar incomodidades, así como también a bajas velocidades girar el volante puede llegar a ser realmente incómodo ya que se requiere un esfuerzo muy grande para tan solo vencer la fricción entre los neumáticos y el asfalto. |
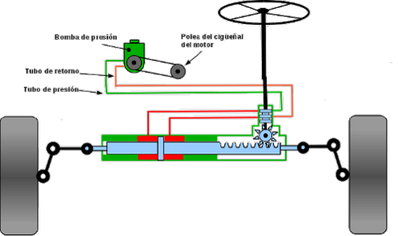
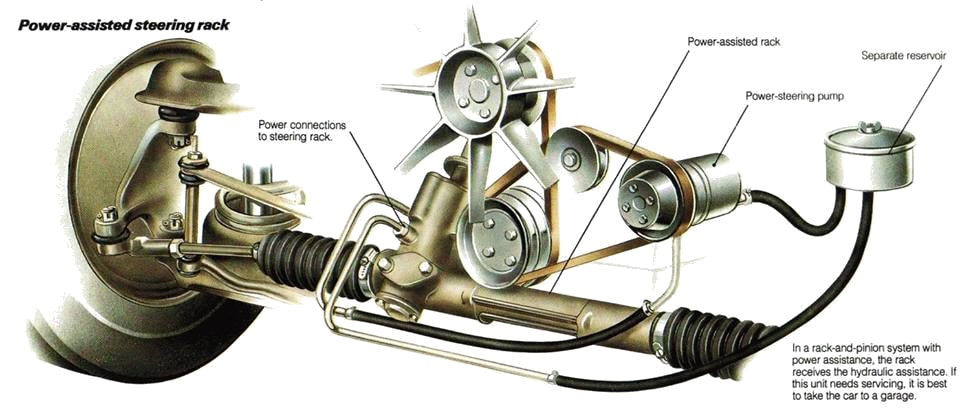
Dirección mecánica asistida: Se compone de una dirección mecánica tal como se describe en el párrafo anterior solo que se le agrega la ayuda de un mecanismo hidráulico que disminuye considerablemente el esfuerzo necesario para hacer girar las ruedas el cual es accionado por una bomba. Su gran ventaja es la capacidad de hacer que el fluido sea el que absorva las vibraciones del camino haciendo que el manejo al volante resulte muy cómodo, pero por esa pequeña "elasticidad" que le proporciona el fluido interno puede que para vehículos de carreras disminuya el tiempo de respuesta al querer girar el volante. También al poseer más componentes resulta ligeramente más costosa y a pesar de eso existe una mayor probabilidad de falla por tener más componentes, sin embargo es la más utilizada hoy en día para todo tipo de vehículos dada su versatilidad.
|
|
|
Dirección Hidráulica: Cuando la masa de los neumáticos resulta tan grande que es practicamente imposible vencer la feurza de roce para hacerlos girar, se utiliza una dirección en la que se reemplazan los elementos mecánicos por un brazo hidráulico que si posee la fuerza suficiente para mover los neumáticos, dicho brazo es impulsado por una bomba accionada remotamente por el volante. es muy utilizada en vehículos de carga y en combinación con direcciones mecánicas asistidas comunes, por otro lado dado que elevar la presión necesaria en los circuitos hidráulicos lleva un tiempo se disminuye considerablemente el tiempo de respuesta de la dirección, y por último, la probabilidad de que la falla inhabilite por completo el sistema de dirección es mucho mayor ya que si llega a perder presión de fluido por una fuga no habrá forma de cambiar la orientación de las ruedas. 
|
Dirección electrónica: Cuando todos los demás tipos de dirección ocupan un espacio considerablemente grande y su masa de componentes mecánicos resulta muy alta o la distancia desde el volante hasta el eje de dirección es muy grande se utilizan direcciones electrónicas, que se componen de un servomotor accionado por la rotación del volante, lo que impulsa a otro motor que recibe la señal eléctrica a girar e impulsar los brazos de la dirección para cambiar de rumbo las ruedas. éste sistema es usado en algunos pocos autos de carreras en los que cada gramo de peso que se pueda ahorrar es sumamente importante, así como también en vehículos experimentales tal vez como los rover que se planean enviar al planeta rojo, en el que cada gramo que se ahorre hace una diferencia. Sin embargo al confiarle únicamente a la electrónica un sistema tan importante también al igual que la dirección hidráulica si llegara a fallar se inutilizaría por completo éste sistema de dirección. 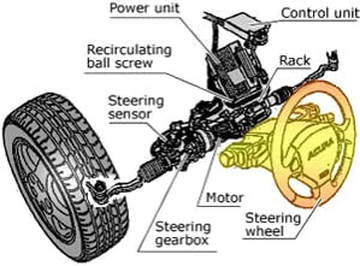
|
2.- Términos básicos para el diseño de un sistema de dirección
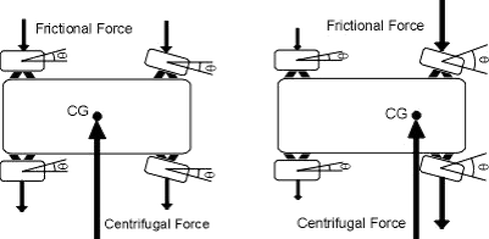
Subviraje: se refiere a una condición producida por una posición inadecuada del centro de gravedad en la que llegado el momento de girar el vehículo tiene tendencia a no cambiar de dirección así las ruedas estén completamente giradas. ésta condición puede ser producto de una falta de tracción en el eje delantero o un exceso de tracción en el eje trasero, lo que deja a las reudas directrices sin gran parte del contacto con el asfalto deslizándose sobre la superficie.

|
|
El sobreviraje : se refiere a una condición producida por una posición inadecuada del centro de gravedad en la que llegado el momento de girar el vehículo tiene tendencia a girar demasiado deslizando el eje trasero. Ésto puede ser provocado por un exceso de tracción o peso sobre el eje delantero o falta de peso en el eje trasero.
El centro de gravedad juega un papel muy importante en la manera como funciona la dirección, puesto que si gran parte del peso del auto está apoyado en su mayoría sobre alguno de los dos ejes conviene que las reudas motrices (de tracción) sean las que reciban ésta proporción mayor del peso ya que son las que impulsan al automóvil. Si bién es cierto que una distribución de pesos 50-50 s ideal, no en todos los casos se puede lograr ésto, sobretodo en los vehículos de uso común de calle en los que la suspensión y dirección no siempre estarán al límite como en un auto de carreras y la probabilidad de experimentar sobreviraje o subviraje resulta muy baja a menos que se conduzca agresivamente o sobre suelo con permafrost producto del agua o nieve.
|
|
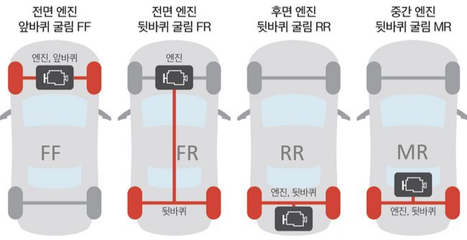
Una de las principales masas suspendidas de un auto es el motor y la transmisión, y el lugar del auto donde se ubiquen también tiene una denominación como se observa en la figura anterior:
FF (Front engine Front traction) , FR (Front engine Rear traction), RR (Rear engine Rear traction) y MR (Mid engine Rear traction) adicional a los vehículos con tracción en las 4 ruedas como el Nissan Skyline, Subaru impreza, Porsche GT2RS, Lamborghini Huracan y otros de éste tipo que ubican su motor en distintos lugares pero aún así compensan la falta de tracción con un sistema 4x4.
Los vehículos FF tienen ligeras tendencias a sufrir de sobreviraje, dado que nada le otorga tracción a las ruedas traseras, al igual que los FR que a pesar de tener las ruedas motrices en el eje trasero en algunos casos el exceso de potencia puede provocar derrapes (caso del mustang, corvette y viper por ejemplo)
Los vehículos RR por otra parte (muchos porsche) sufren de subviraje, puesto que no poseen casi peso apoyado en el eje delantero sin embargo para líneas rectas al igual que los FR Y MR puede resultar mucho más favorable dado que el efecto squat hará que las masas se transfieran hacia los ejes donde está la tracción.
Por último los MR son los que suelen tener una distribución de pesos casi del 50-50 (como algunos ferrari, lamborghini, honda nsx, audi, pagani, koenigsegg y otros) hacíendola la configuración más idónea para circuitos con muchas curvas y a la vez con rectas.
Agarre mecánico vs Agarre Aerodinámico: Si bién es cierto que el agarre y tracción en las ruedas tiene mucho que ver con el centro de gravedad, en altas velocidades la inercia que provocan las transferencias de masas puede llegar a ser un poco menos agresiva y comienza a jugar un papel más importante la aerodinámica.
Entre los 0 y 80km/h el agarre en los neumáticos es denominado un agarre mecánico y es producto de una buena dinámica de la suspensión...
por otro lado de los 120km en adelante el agarre comienza a ser netamente aerodinámico, donde sin importar que las masas se transfieran hacia los lados en las curvas el downforce (fuerza descendente) de los alerones mantendrá a las ruedas en contacto con el suelo en todo momento.
Entre los 80 y los 120km/h existe una combinación de ambos tipos de agarre y por eso muchos circuitos del mundo están diseñados de forma que las velocidades promedio en sus curvas sea entre 80 y 120km/h porque se llevan a los límites tanto la aerodinámica a baja velocidad como la suspensión.
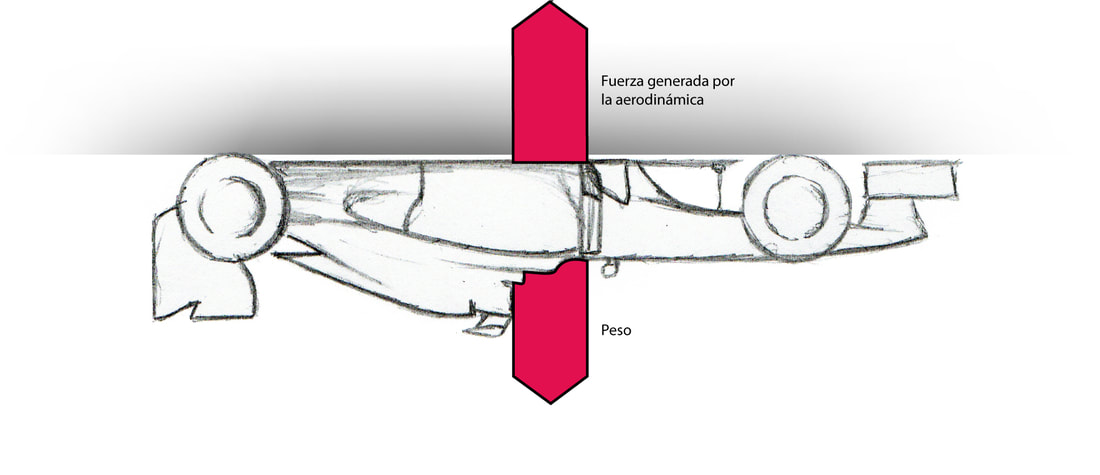
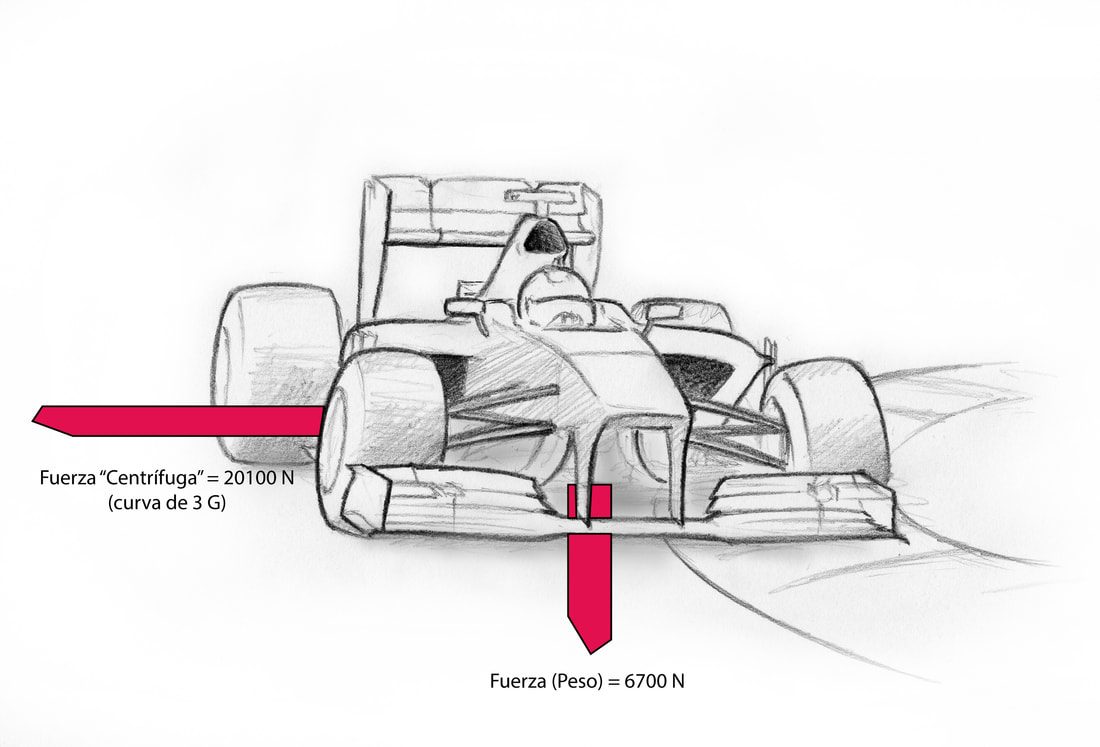
En teoría el agarre aerodinámico que genera un F1 a altas velocidades supera el propio peso del auto por lo que debería ser capaz de mantenerse a si mismo adherido a un techo desplazándose de cabeza.
|
|
Adicionalmente tanta fuerza descendente hará que los pilotos sufran los efectos de más de 2 fuerzas G (dos veces la gravedad)
Por otra parte, existen carreras en las que las velocidades en curvas suelen ser un poco más bajas y los autos tan ligeros pero aún así se debe producir un agarre extra que se logra por medio de la aerodinámica, sin embargo los alerones usados deben ser masivamente grandes para poder producir un agarre a tan baja velocidad, ésto mejora mucho el comportamiento en curvas pero crea un arrastre muy grande en rectas a altas velocidades.
Un ejemplo de ésto es el tip ode autos que suelen verse en la carrera norteamericana PikesPeak en la que se suelen encontrar vehículos con alerones tan altos para garantizar un agarre en curvas tan cerradas y peligrosas (porque al ser en una montaña tal vez como la ruta a cubiro, pueden caerse de acantilados)
Por otra parte, existen carreras en las que las velocidades en curvas suelen ser un poco más bajas y los autos tan ligeros pero aún así se debe producir un agarre extra que se logra por medio de la aerodinámica, sin embargo los alerones usados deben ser masivamente grandes para poder producir un agarre a tan baja velocidad, ésto mejora mucho el comportamiento en curvas pero crea un arrastre muy grande en rectas a altas velocidades.
Un ejemplo de ésto es el tip ode autos que suelen verse en la carrera norteamericana PikesPeak en la que se suelen encontrar vehículos con alerones tan altos para garantizar un agarre en curvas tan cerradas y peligrosas (porque al ser en una montaña tal vez como la ruta a cubiro, pueden caerse de acantilados)

APEX: en las carreras, cuando una curva por la que debe circular un auto posee una trayectoria "ideal" en la que el auto no deba disminuir tanto la velocidad y se logra siguiendo sibujando un recorrido donde el radio sea el mayor posible en función de las dimensiones del auto tal como en la siguiente serie de imágenes:
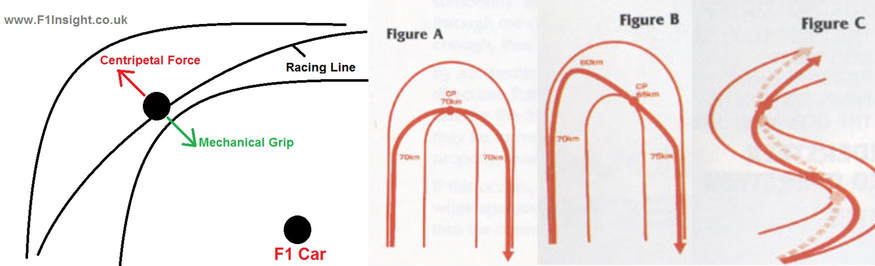
En el caso de la figura B el auto deberá frenar mucho antes de la curva luego girar muy briscamente y compensar acelerando hasta salir neuvamente de la curva, lo que puede traducirse en un desgaste mayor en los neumáticos. Por otro lado en la Figura A se observa una frenada antes de la curva, luego en una velocidad constante se sigue una curva de radio mayor que la del circuito pasando del lado externo, al lado interno y al externo nuevamente para de esa manera lograr un apex correcto.
En la figura C se observa la linea de apex combinada de varias curvas sucesivas, para éstos casos los pilotos dibujan su línea de apex comenzando de manera invertida el circuito, es decir hacia atras, fijándose primero de qué lado debería salir en la última curva asií hasta dibujar la entrada hacia la primera curva del circuito.
En la figura C se observa la linea de apex combinada de varias curvas sucesivas, para éstos casos los pilotos dibujan su línea de apex comenzando de manera invertida el circuito, es decir hacia atras, fijándose primero de qué lado debería salir en la última curva asií hasta dibujar la entrada hacia la primera curva del circuito.
3.- Cálculos para el sistema de dirección
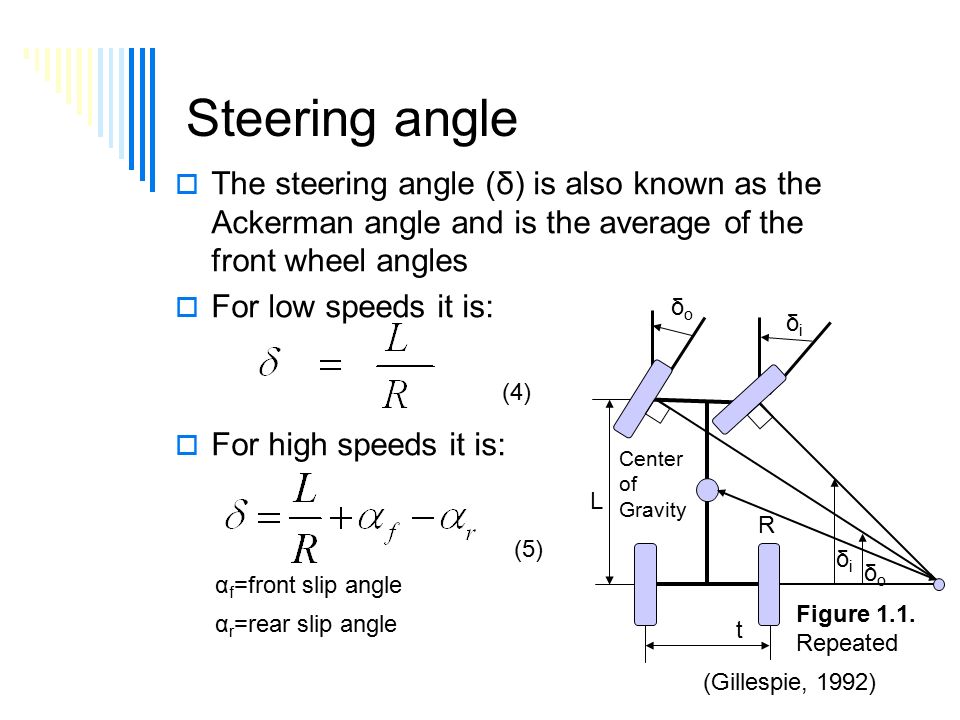
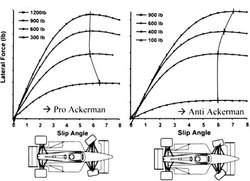
Lo primero a definir para el sistema de dirección (y se realiza en conjunto con el diseño de suspensión) es el ángulo de ackermann, ya que con éste se determinará si el vehículo llevará un ackermann positivo (para vehículos de calle) o ackermann invertido (para vehículos de carrera) y se obtiene de la siguiente manera:
|
|
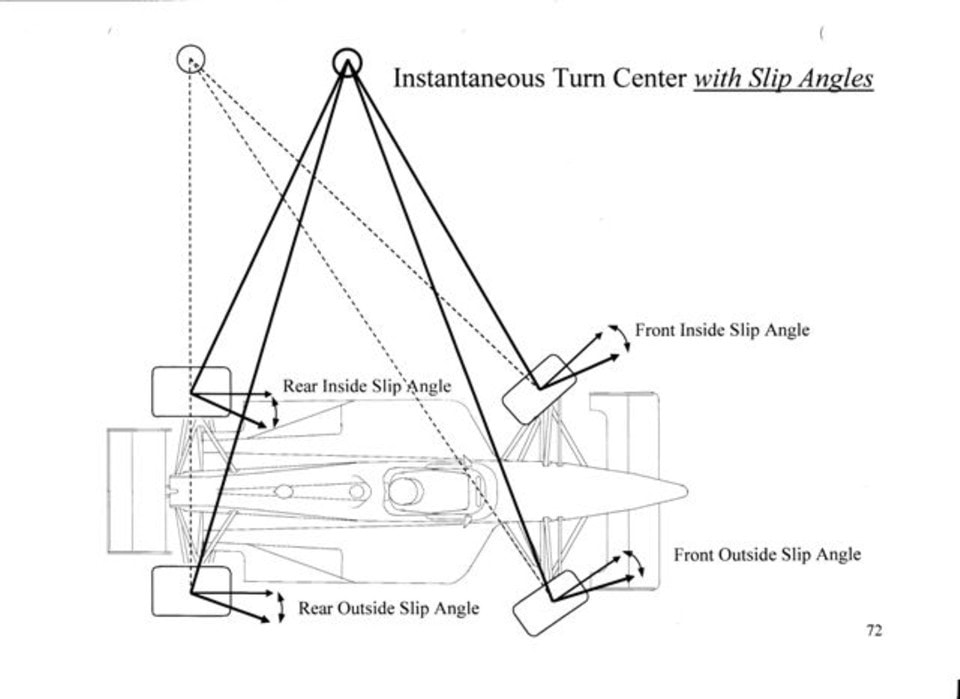
Para valores más exactos se recomienda utilizar el ángulo de slip de los neumáticos previamente seleccionados para el vehículo
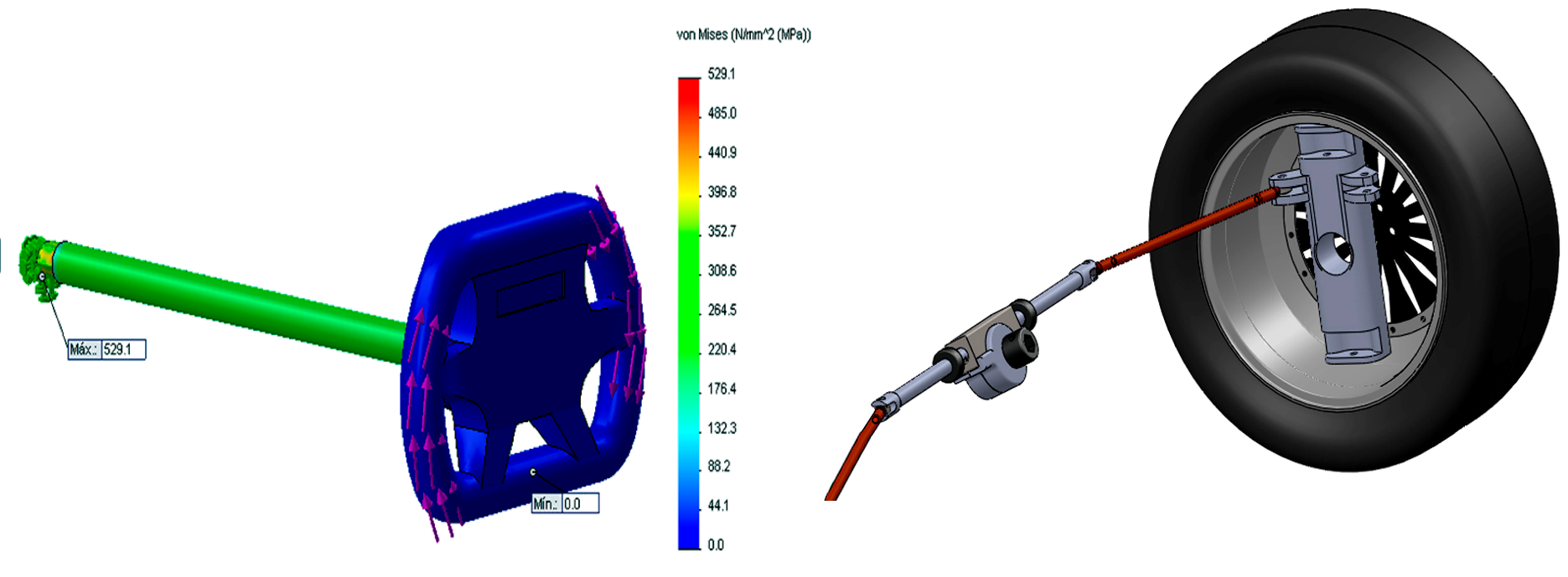
Seguidamente, en conjunto con el diseó de la suspensión y los frenos se desarrolla un portamasas capaz de soportar el esfeurzo generado por la suspensión, la torsión generada por los frenos y la flexión que generará la dirección (todo al mismo tiempo en caso hipotético de una frenada brusca donde el vehículo hará un Dive entrando a una curva y sucederán éstos tres factores al mismo tiempo)
De las tablas de los ángulos de slip de los neumáticos se ubica el valor de fuerza lateral que se necesita para producir el ángulo de slip seleccionado lo que sumado algebráicamente al peso del neumático, rin, portamasas y rodamiento y acción de la suspensión se obtiene un valor en Newtons de fuerza que debe ejercer el brazo de la dirección para hacer girar la rueda hacia otra dirección.
Luego con ese valor obtenido se diseñan las cremalleras y piñón logrando subir hasta el cardan y definir el volante en función del torque que haya que ejercer y el diámetro que llevará el mismo.
Toda ésta etapa es conveniente simularla a través de softwares de análisis mecánicos para garantizar la viabilidad del diseño final y luego corroborarlo con las respectivas teorías de diseño de elementos de máquinas.
De las tablas de los ángulos de slip de los neumáticos se ubica el valor de fuerza lateral que se necesita para producir el ángulo de slip seleccionado lo que sumado algebráicamente al peso del neumático, rin, portamasas y rodamiento y acción de la suspensión se obtiene un valor en Newtons de fuerza que debe ejercer el brazo de la dirección para hacer girar la rueda hacia otra dirección.
Luego con ese valor obtenido se diseñan las cremalleras y piñón logrando subir hasta el cardan y definir el volante en función del torque que haya que ejercer y el diámetro que llevará el mismo.
Toda ésta etapa es conveniente simularla a través de softwares de análisis mecánicos para garantizar la viabilidad del diseño final y luego corroborarlo con las respectivas teorías de diseño de elementos de máquinas.
Fun Fact (Dato curioso)
Algunos vehículos por ahorro de peso y por abaratar costos optan por crear automóviles con tres ruedas, como los de las mágenes a contnuación:

Ambos autos son parecidos, ambos poseen las ruedas directrices en el eje frontal, sin embargo el caso del autmóvil azul de la derecha tendrá tendencia a volcamiento en casos en los que la transferencia de masas (y su relativamente alt ocentro de gravedad) intente enviar las masas hacia la parte delantera, poniéndolo en desequilibrio como el famoso "reliant robin" un auto de tres ruedas que sirvió unicamente para decirle al mundo que si se va a diseñar un auto de tres ruedas, la rueda que quedará solitaria debe ser la trasera

|

|
Cómo utilizar correctamente el sistema de dirección para estacionar en paralelo: